#include "data.h"
#include "sysdep.h"
Go to the source code of this file.
- Date
- Created on: Oct 10, 2024
- Author
- Jerry Ukwela (jeu6@.nosp@m.case.nosp@m..edu)
Definition in file states.c.
◆ None
◆ StartOrStop
| #define StartOrStop |
( |
| CommType, |
|
|
| FuncStart, |
|
|
| FuncStop ) |
Value: if(newCommunicationState->CommType && d->CurrentCommunicationState.CommType == 0){\
MSG_WAR(0x9999,#FuncStart, 9999);\
d->CurrentCommunicationState.CommType = 1;\
FuncStart;\
}else if(!newCommunicationState->CommType && d->CurrentCommunicationState.CommType == 1){\
MSG_WAR(0x9999,#FuncStop, 9999);\
d->CurrentCommunicationState.CommType = 0;\
FuncStop;\
}
Definition at line 115 of file states.c.
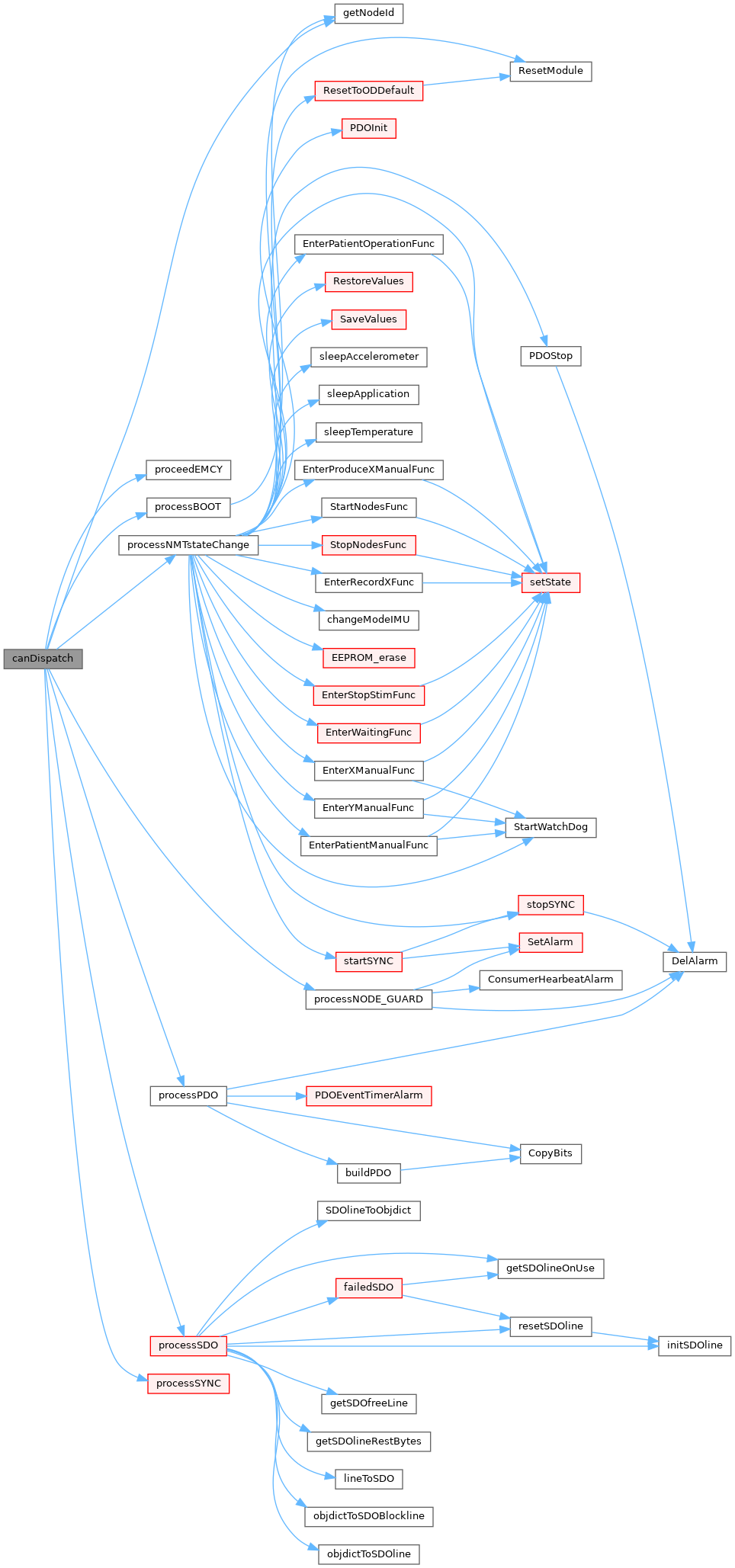
◆ canDispatch()
Called by driver/app when receiving messages.
- Parameters
-
| *d | Pointer on a CAN object data structure |
| *m | Pointer on a CAN message structure |
Definition at line 43 of file states.c.