|
NNP STM Generic Remote Module git-main
|
|
NNP STM Generic Remote Module git-main
|

Functions | |
| e_nodeState | getNodeState (CO_Data *d, UNS8 nodeId) |
| To read the state of a node This can be used by the master after having sent a life guard request, of by any node if it is waiting for heartbeat. | |
| e_nodeState | getState (CO_Data *d) |
| Returns the state of the node. | |
| void | switchCommunicationState (CO_Data *d, s_state_communication *newCommunicationState) |
| <BRIEF> switchCommunicationState | |
| UNS8 | setState (CO_Data *d, e_nodeState newState) |
| Change the state of the node. | |
| UNS8 | getNodeId (CO_Data *d) |
| Returns the nodId. | |
| void | setNodeId (CO_Data *d, UNS8 nodeId) |
| Define the node ID. Initialize the object dictionary. | |
| void | _mode_X_Manual (CO_Data *d) |
| Function that user app can overload. | |
| void | _mode_Y_Manual (CO_Data *d) |
| Function that user app can overload. | |
| void | _waiting (CO_Data *d) |
| Function that user app can overload. | |
| void | _stopped (CO_Data *d) |
| Function that user app can overload. | |
| void | _mode_Patient_Manual (CO_Data *d) |
| Function that user app can overload. | |
| void | _mode_Patient_Control (CO_Data *d) |
| Function that user app can overload. | |
| void _mode_Patient_Control | ( | CO_Data * | d | ) |
| void _mode_Patient_Manual | ( | CO_Data * | d | ) |
| void _mode_X_Manual | ( | CO_Data * | d | ) |
| void _mode_Y_Manual | ( | CO_Data * | d | ) |
| void _stopped | ( | CO_Data * | d | ) |
| void _waiting | ( | CO_Data * | d | ) |
Returns the nodId.
| *d | Pointer on a CAN object data structure |
Definition at line 250 of file states.c.
Referenced by canDispatch(), and processBOOT().

To read the state of a node This can be used by the master after having sent a life guard request, of by any node if it is waiting for heartbeat.
| *d | Pointer on a CAN object data structure |
| nodeId | Id of a node |
| e_nodeState getState | ( | CO_Data * | d | ) |
Define the node ID. Initialize the object dictionary.
| *d | Pointer on a CAN object data structure |
| nodeId | The node ID to assign |
Definition at line 261 of file states.c.
Referenced by initNodeIDSerialNumber().

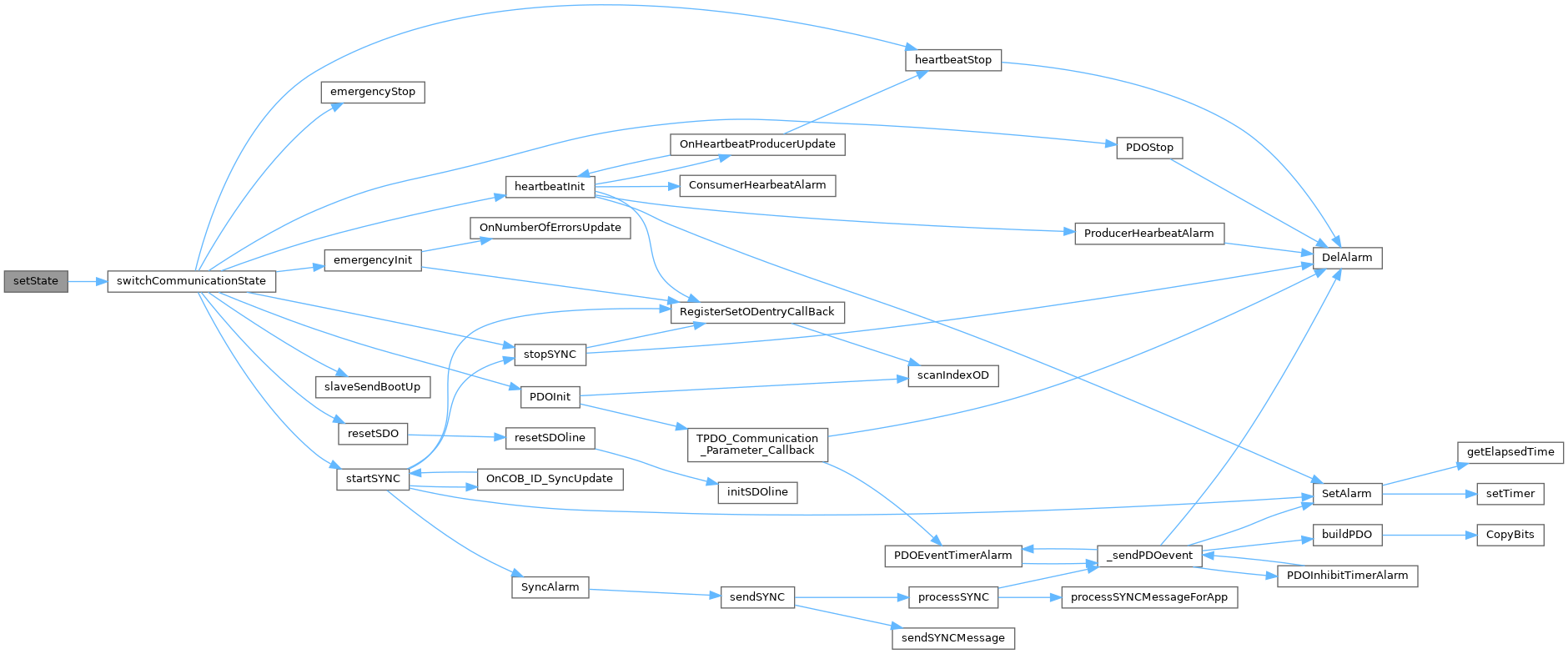
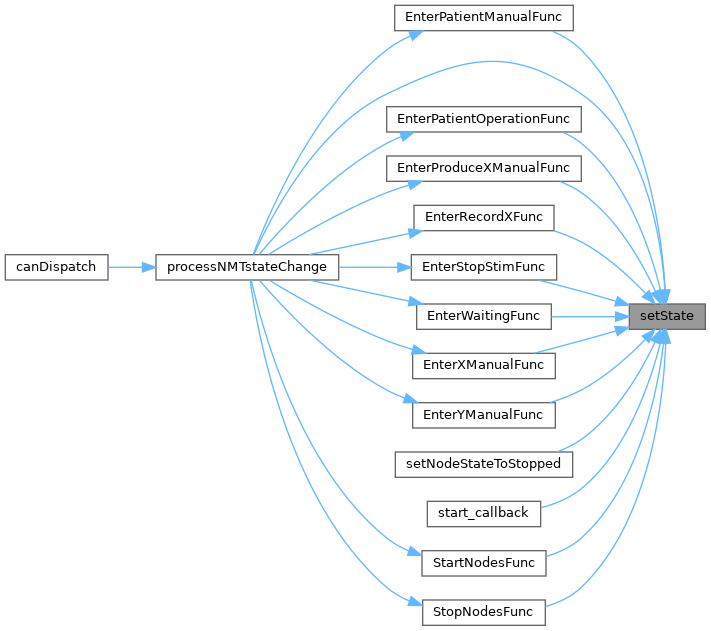
Change the state of the node.
| *d | Pointer on a CAN object data structure |
| newState | The state to assign |
Definition at line 161 of file states.c.
Referenced by EnterPatientManualFunc(), EnterPatientOperationFunc(), EnterProduceXManualFunc(), EnterRecordXFunc(), EnterStopStimFunc(), EnterWaitingFunc(), EnterXManualFunc(), EnterYManualFunc(), processNMTstateChange(), setNodeStateToStopped(), start_callback(), StartNodesFunc(), and StopNodesFunc().
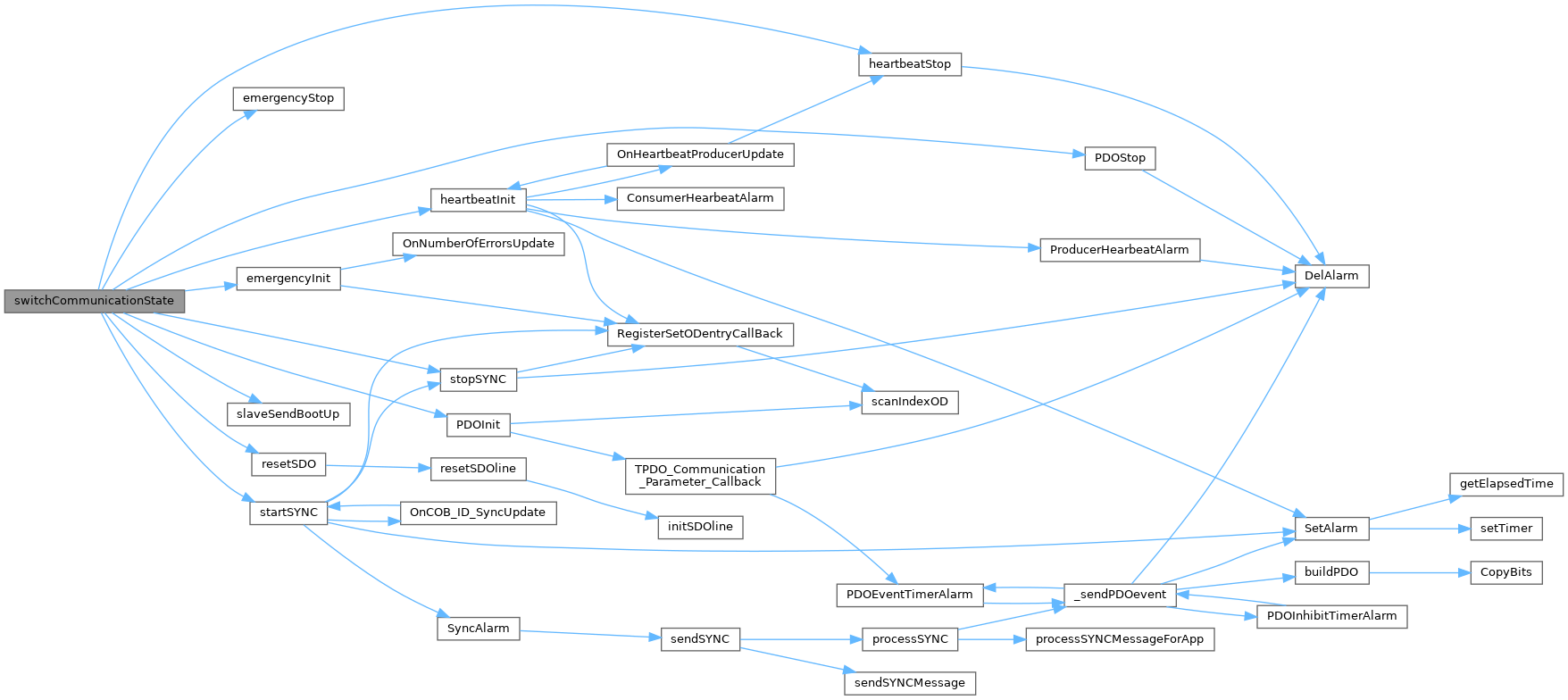
| void switchCommunicationState | ( | CO_Data * | d, |
| s_state_communication * | newCommunicationState ) |
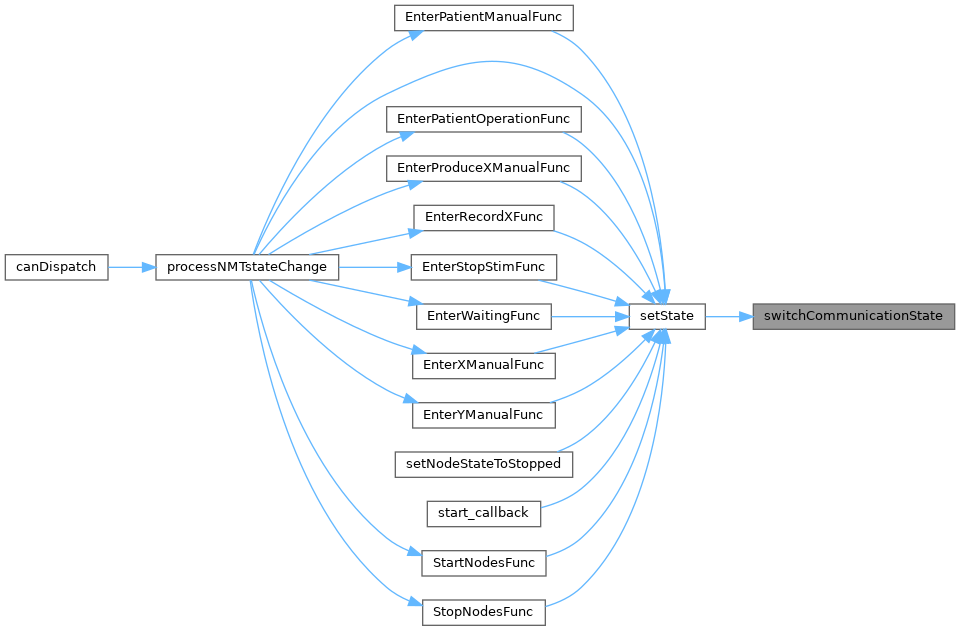
<BRIEF> switchCommunicationState
Prototypes for internals functions
| d | |
| newCommunicationState |
Definition at line 133 of file states.c.
Referenced by setState().