|
NNP STM Generic Remote Module git-main
|
|
NNP STM Generic Remote Module git-main
|

Functions | |
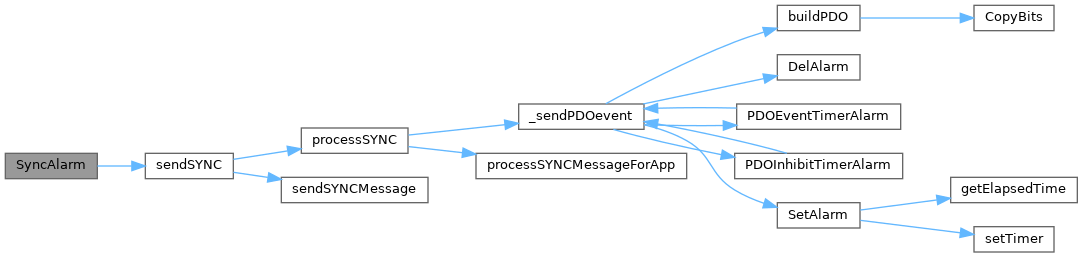
| void | SyncAlarm (CO_Data *d, UNS32 id) |
| <BRIEF> SyncAlarm | |
| UNS32 | OnCOB_ID_SyncUpdate (CO_Data *d, const indextable *unsused_indextable, UNS8 unsused_bSubindex) |
| This is called when Index 0x1005 is updated. | |
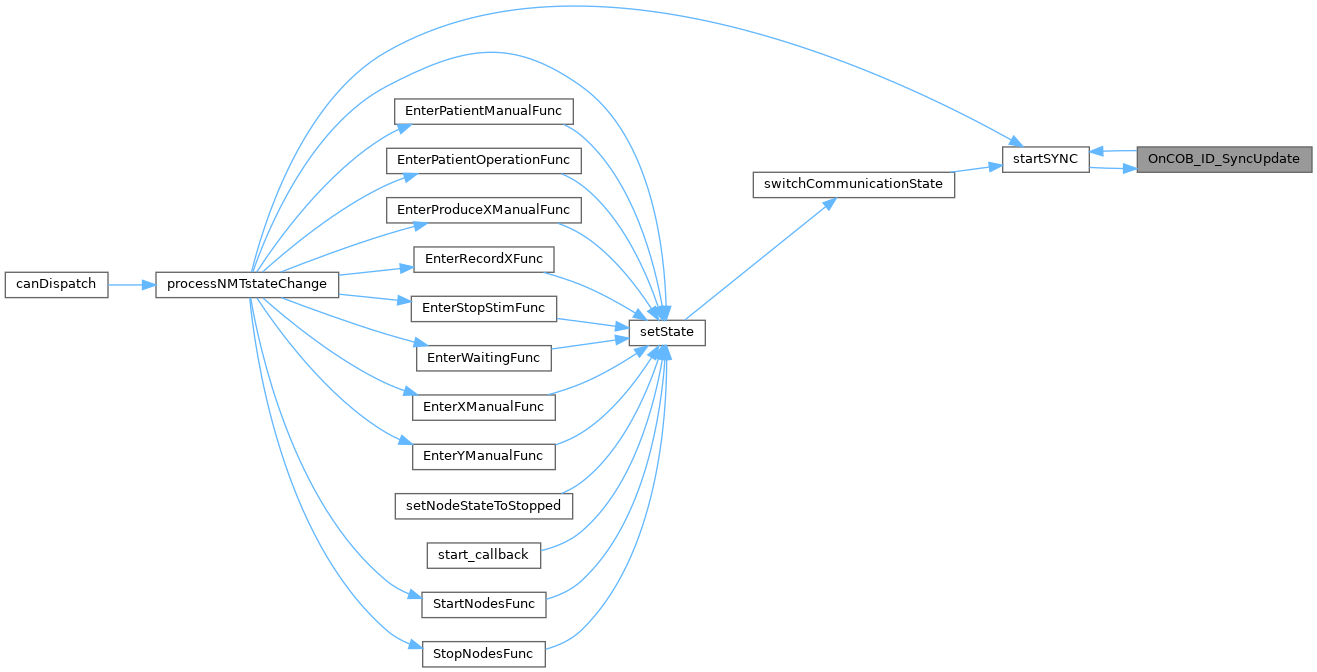
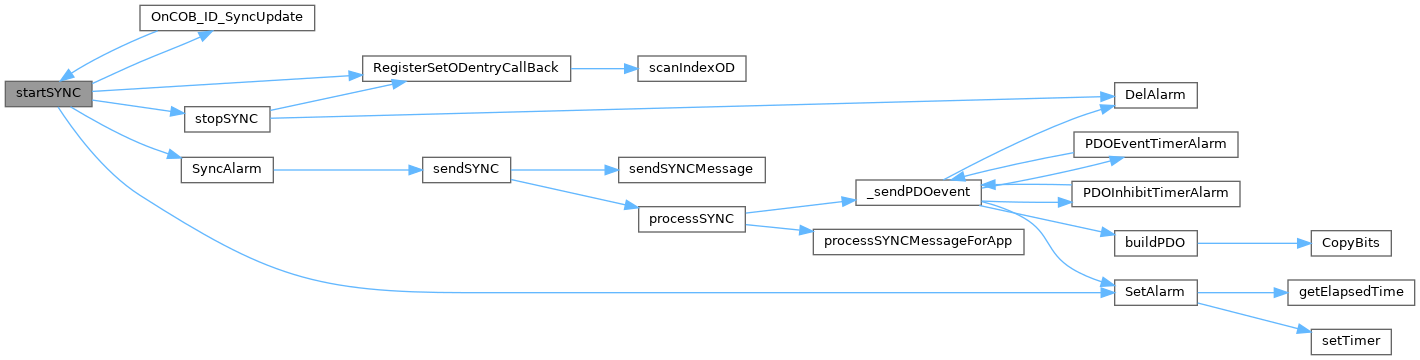
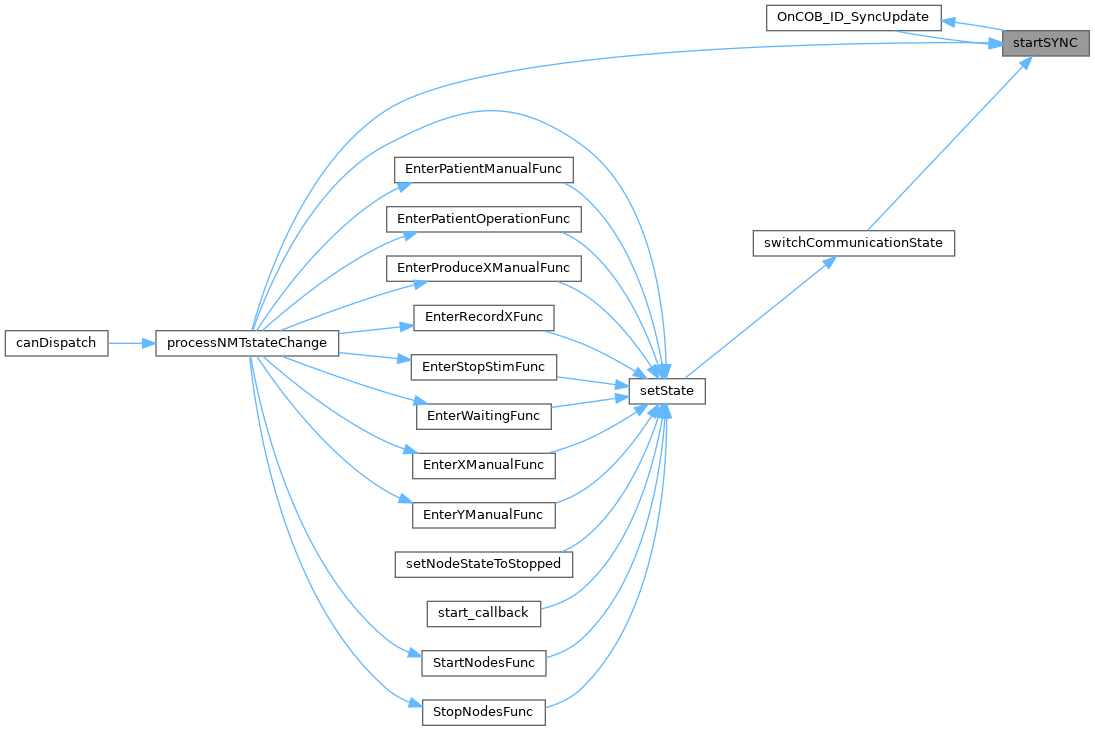
| void | startSYNC (CO_Data *d) |
| <BRIEF> startSYNC | |
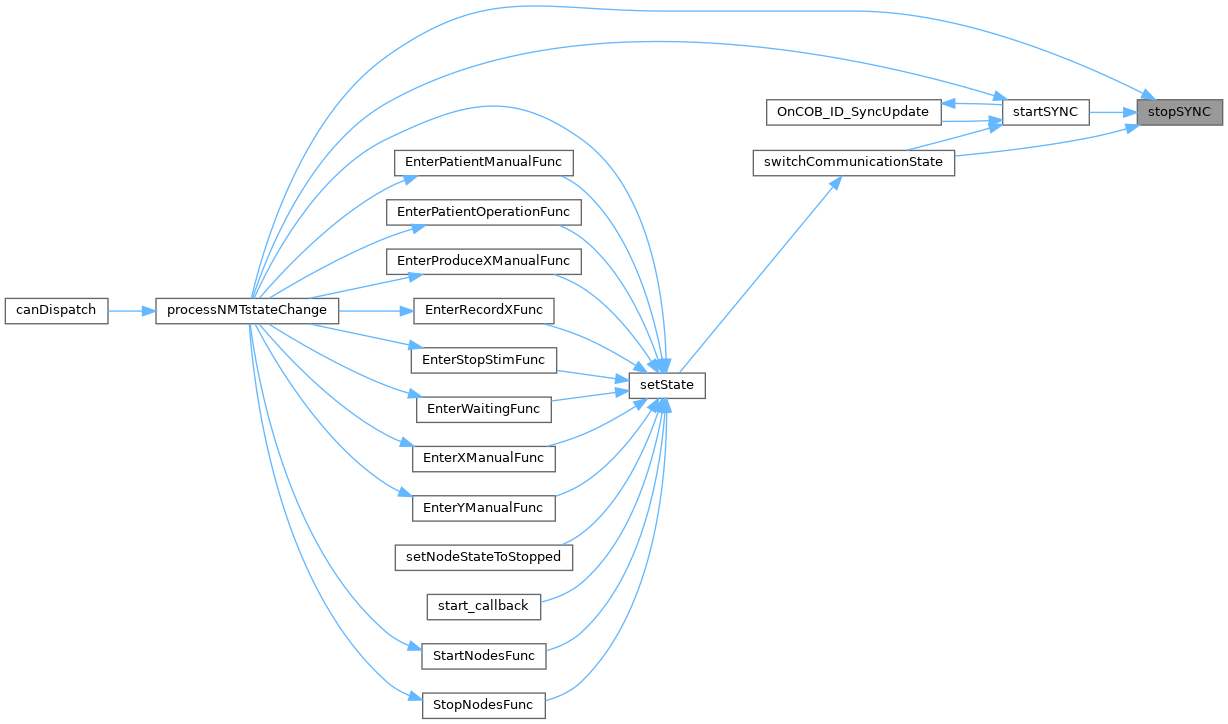
| void | stopSYNC (CO_Data *d) |
| <BRIEF> stopSYNC | |
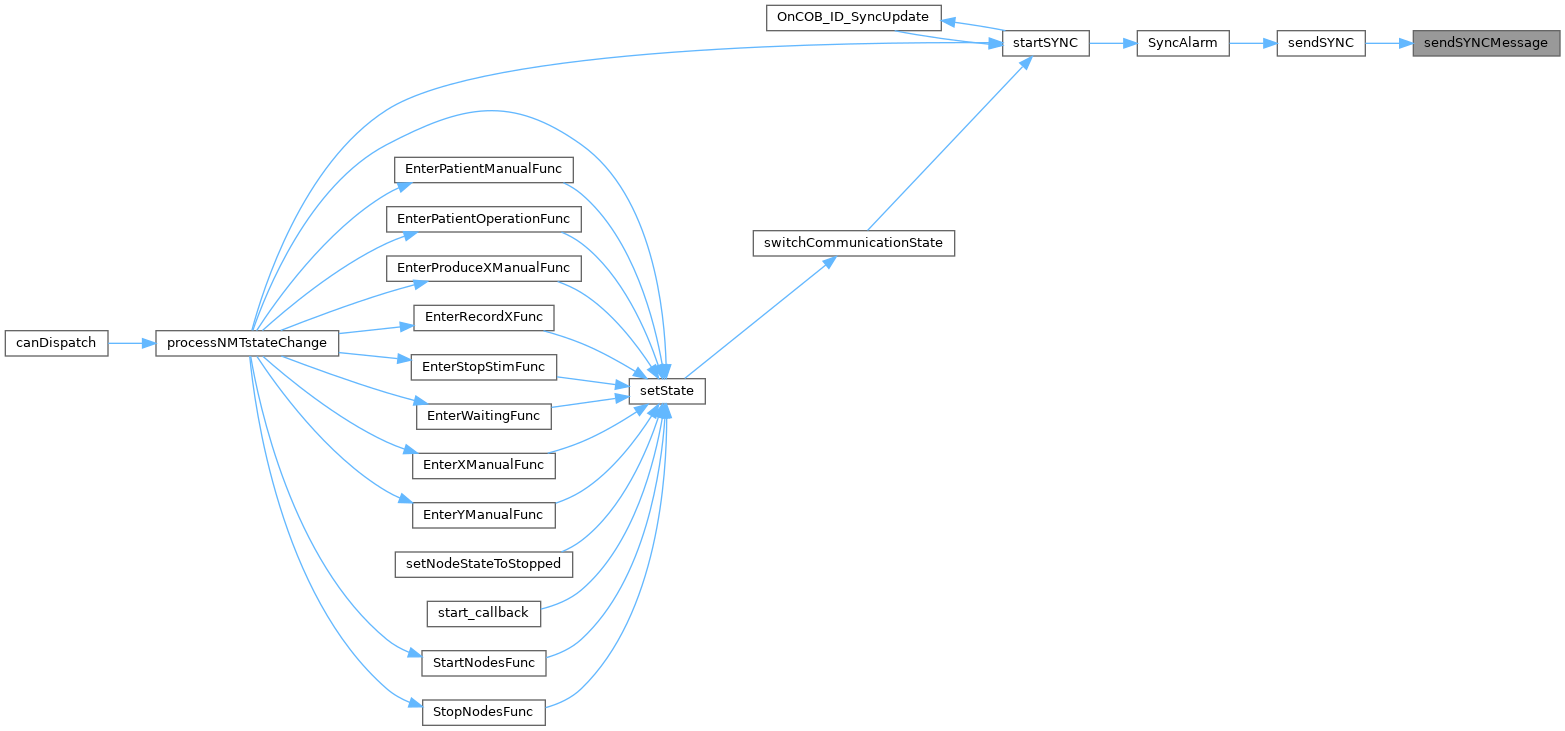
| UNS8 | sendSYNCMessage (CO_Data *d) |
| Transmit a SYNC message on CAN bus. | |
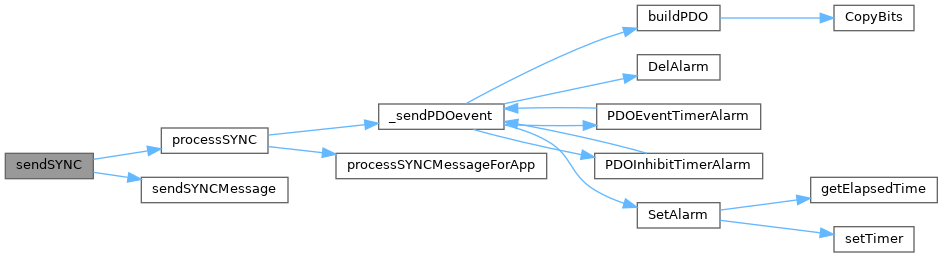
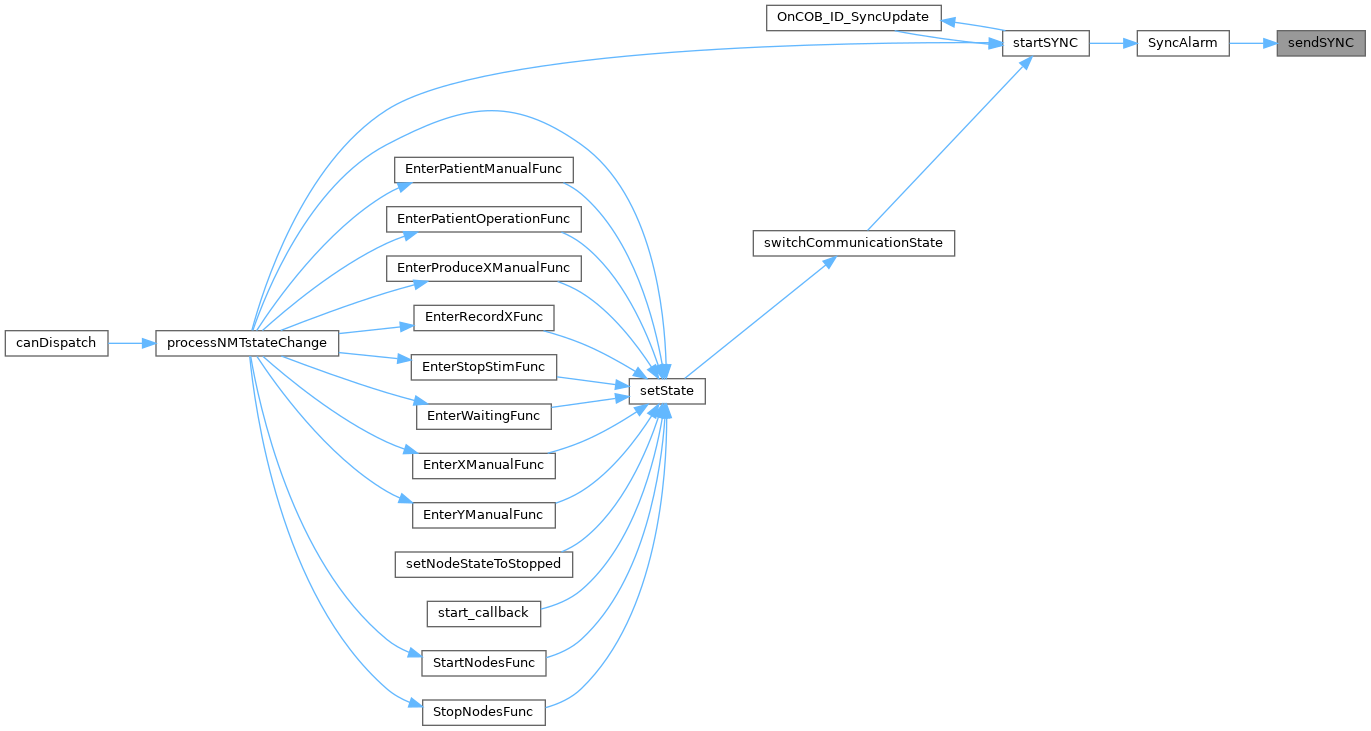
| UNS8 | sendSYNC (CO_Data *d) |
| Transmit a SYNC message and trigger sync TPDOs. | |
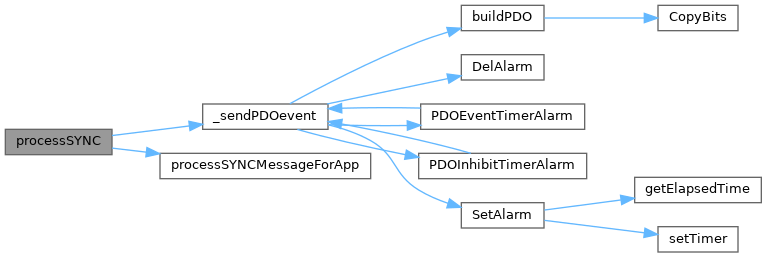
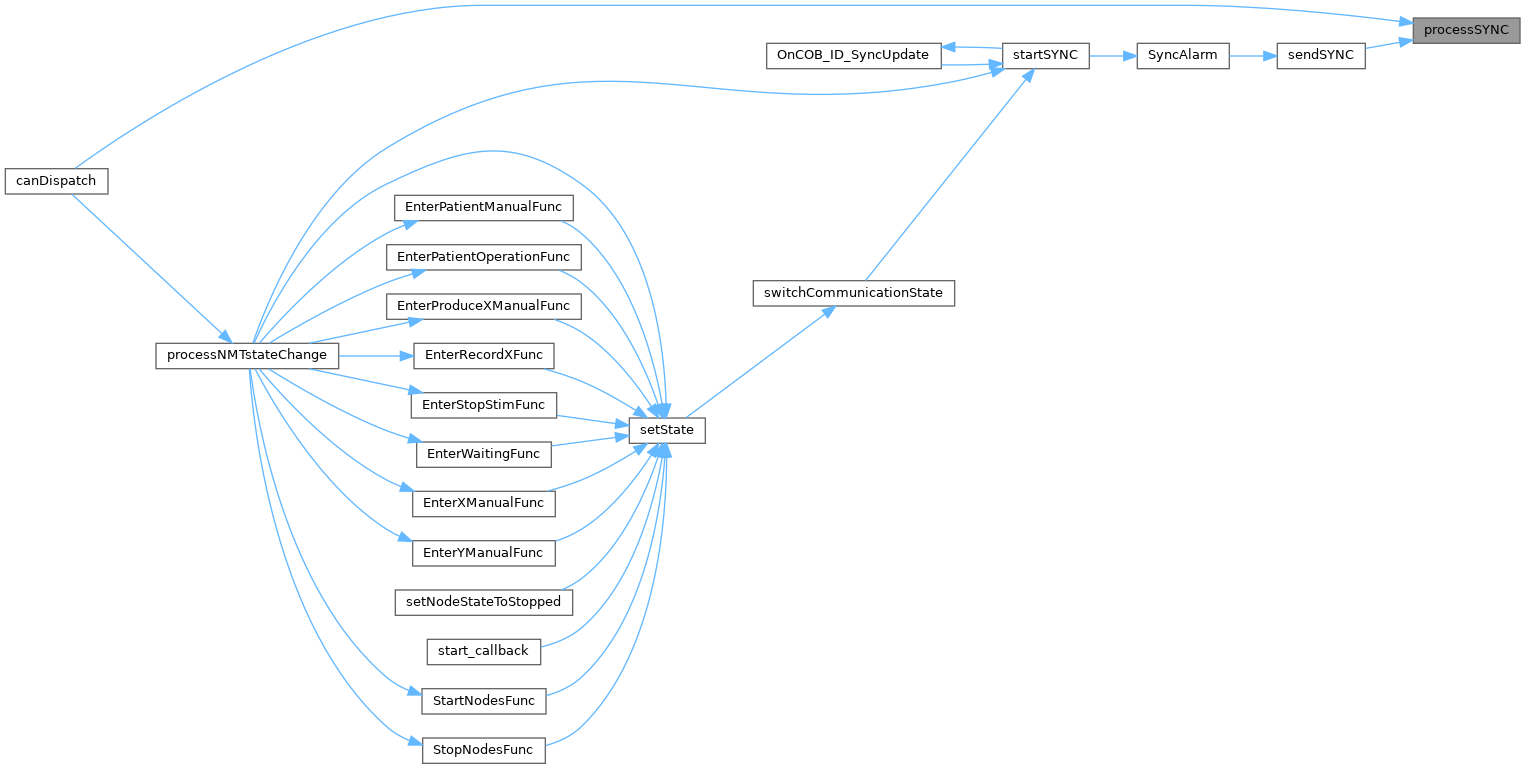
| UNS8 | processSYNC (CO_Data *d, Message *m) |
| This function is called when the node is receiving a SYNC message (cob-id = 0x80). | |
| void | _post_sync (CO_Data *d) |
| <BRIEF> _post_sync | |
| void | _post_TPDO (CO_Data *d) |
| <BRIEF> _post_TPDO | |
| void _post_sync | ( | CO_Data * | d | ) |
| void _post_TPDO | ( | CO_Data * | d | ) |
| UNS32 OnCOB_ID_SyncUpdate | ( | CO_Data * | d, |
| const indextable * | unsused_indextable, | ||
| UNS8 | unsused_bSubindex ) |
This is called when Index 0x1005 is updated.
| *d | Pointer on a CAN object data structure |
| unsused_indextable | |
| unsused_bSubindex |
Definition at line 47 of file sync.c.
Referenced by startSYNC().

This function is called when the node is receiving a SYNC message (cob-id = 0x80).
| *d | Pointer on a CAN object data structure |
Definition at line 135 of file sync.c.
Referenced by canDispatch(), and sendSYNC().
Transmit a SYNC message and trigger sync TPDOs.
| *d | Pointer on a CAN object data structure |
Definition at line 117 of file sync.c.
Referenced by SyncAlarm().
Transmit a SYNC message on CAN bus.
| *d | Pointer on a CAN object data structure |
Definition at line 97 of file sync.c.
Referenced by sendSYNC().
| void startSYNC | ( | CO_Data * | d | ) |
<BRIEF> startSYNC
| *d | Pointer on a CAN object data structure |
Definition at line 58 of file sync.c.
Referenced by OnCOB_ID_SyncUpdate(), processNMTstateChange(), and switchCommunicationState().
| void stopSYNC | ( | CO_Data * | d | ) |
<BRIEF> stopSYNC
| *d | Pointer on a CAN object data structure |
Definition at line 83 of file sync.c.
Referenced by processNMTstateChange(), startSYNC(), and switchCommunicationState().

<BRIEF> SyncAlarm
| *d | Pointer on a CAN object data structure |
| id | not used |
Definition at line 33 of file sync.c.
Referenced by startSYNC().