|
NNP STM Generic Remote Module git-main
|
|
NNP STM Generic Remote Module git-main
|

Functions | |
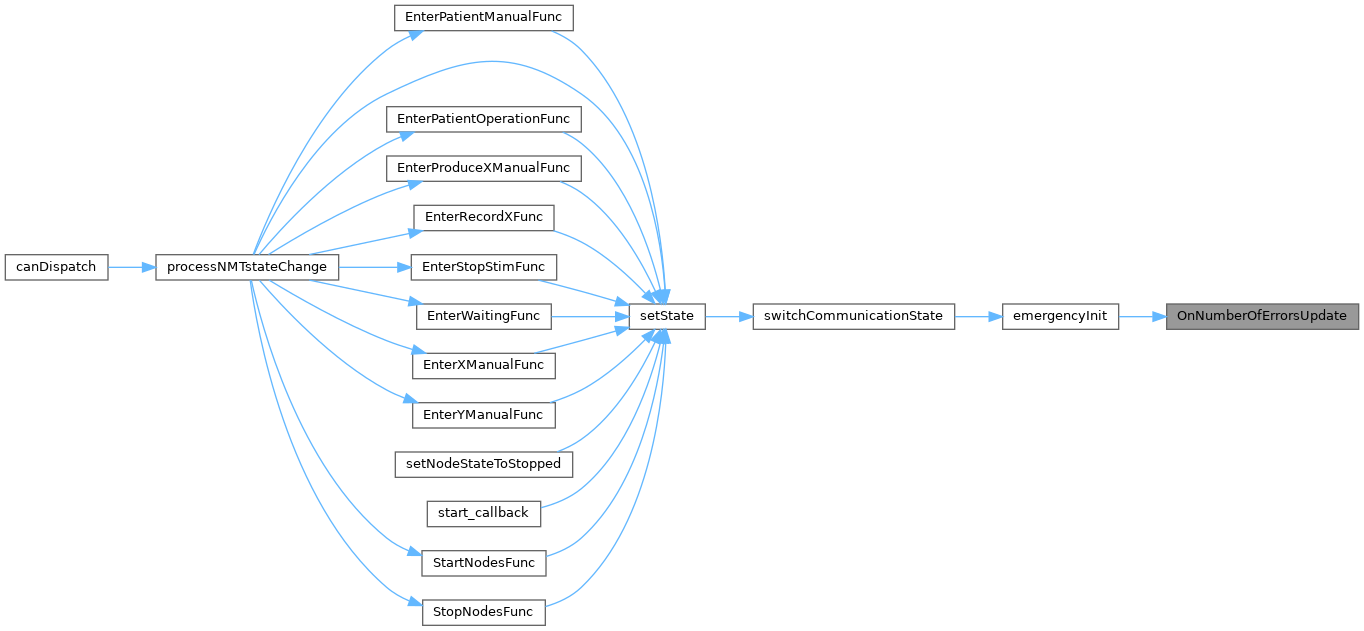
| UNS32 | OnNumberOfErrorsUpdate (CO_Data *d, const indextable *unsused_indextable, UNS8 unsused_bSubindex) |
| This is called when Index 0x1003 is updated. | |
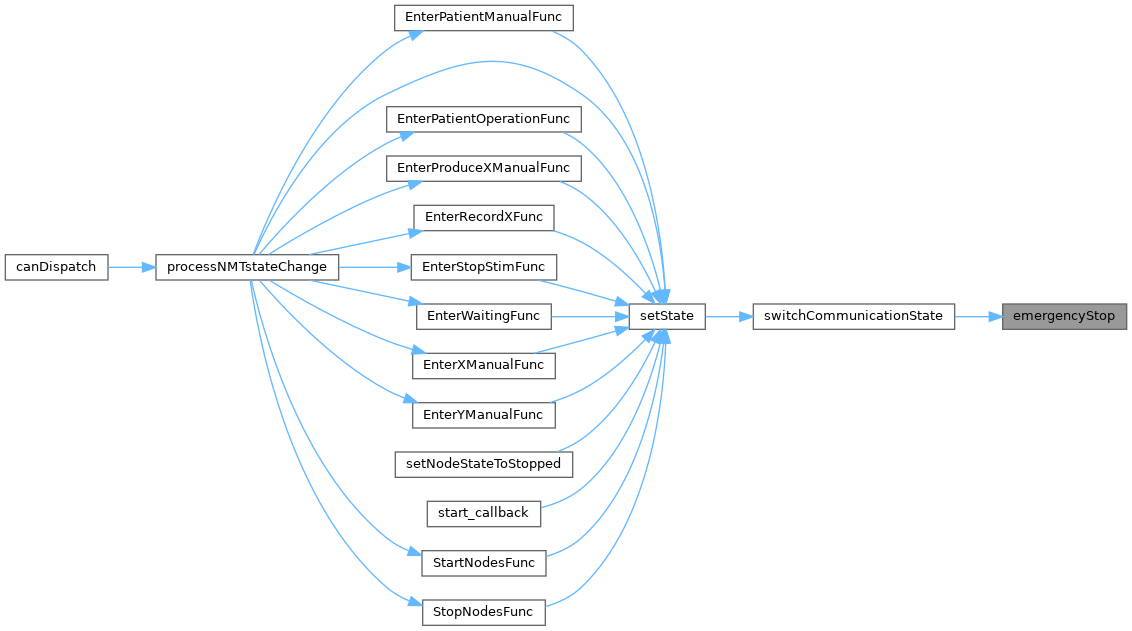
| void | emergencyInit (CO_Data *d) |
| Start EMCY consumer and producer. | |
| void | emergencyStop (CO_Data *d) |
| Stop EMCY producer and consumer. | |
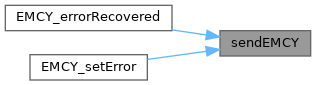
| UNS8 | sendEMCY (CO_Data *d, UNS16 errCode, UNS8 errRegister) |
| <BRIEF> sendEMCY | |
| UNS8 | EMCY_setError (CO_Data *d, UNS16 errCode, UNS8 errRegMask, UNS16 addInfo) |
| Sets a new error with code errCode. Also sets corresponding bits in Error register (1001h) | |
| void | EMCY_errorRecovered (CO_Data *d, UNS16 errCode) |
| Indicates it has recovered from error errCode. Also clears corresponding bits in Error register (1001h) | |
| void | proceedEMCY (CO_Data *d, Message *m) |
| This function is responsible to process an EMCY canopen-message. | |
| void | _post_emcy (CO_Data *d, UNS8 nodeID, UNS16 errCode, UNS8 errReg) |
| <BRIEF> _post_emcy | |
| void emergencyInit | ( | CO_Data * | d | ) |
Start EMCY consumer and producer.
| *d | Pointer on a CAN object data structure |
Definition at line 50 of file emcy.c.
Referenced by switchCommunicationState().

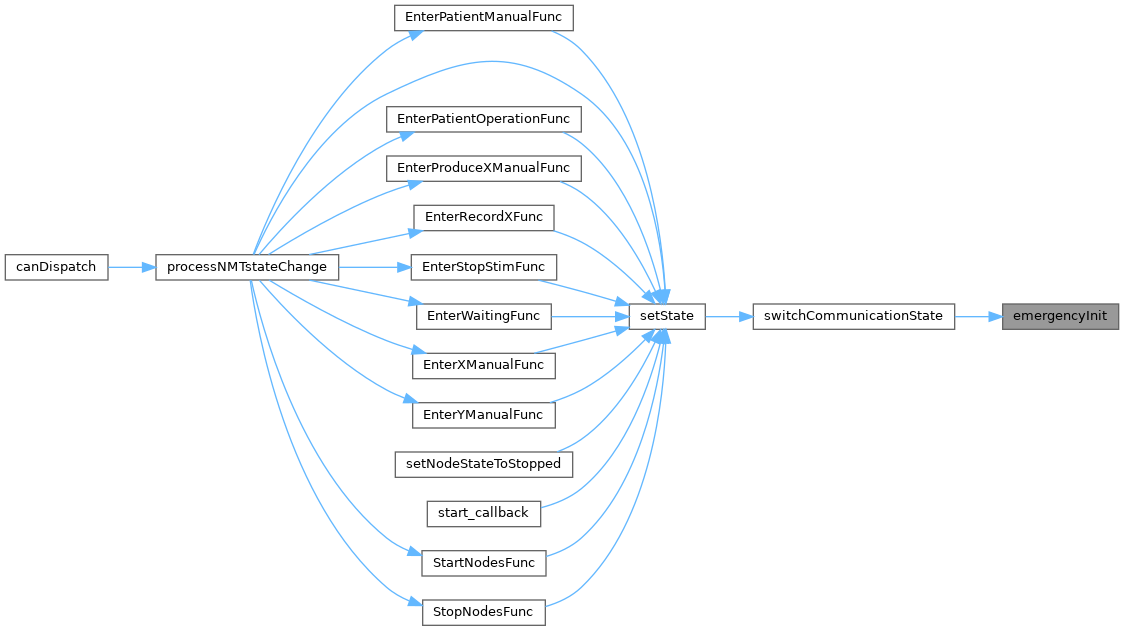
| void emergencyStop | ( | CO_Data * | d | ) |
Stop EMCY producer and consumer.
| *d | Pointer on a CAN object data structure |
Definition at line 62 of file emcy.c.
Referenced by switchCommunicationState().
| UNS32 OnNumberOfErrorsUpdate | ( | CO_Data * | d, |
| const indextable * | unsused_indextable, | ||
| UNS8 | unsused_bSubindex ) |
This is called when Index 0x1003 is updated.
| *d | Pointer on a CAN object data structure |
| unsused_indextable | |
| unsused_bSubindex |
Definition at line 32 of file emcy.c.
Referenced by emergencyInit().
This function is responsible to process an EMCY canopen-message.
| *d | Pointer on a CAN object data structure |
| *m | Pointer on the CAN-message which has to be analysed. |
Definition at line 202 of file emcy.c.
Referenced by canDispatch().

<BRIEF> sendEMCY
| *d | Pointer on a CAN object data structure |
| errCode | The error code |
| errRegister |
Definition at line 75 of file emcy.c.
Referenced by EMCY_errorRecovered(), and EMCY_setError().