|
NNP STM Generic Remote Module git-main
|
|
NNP STM Generic Remote Module git-main
|

Functions | |
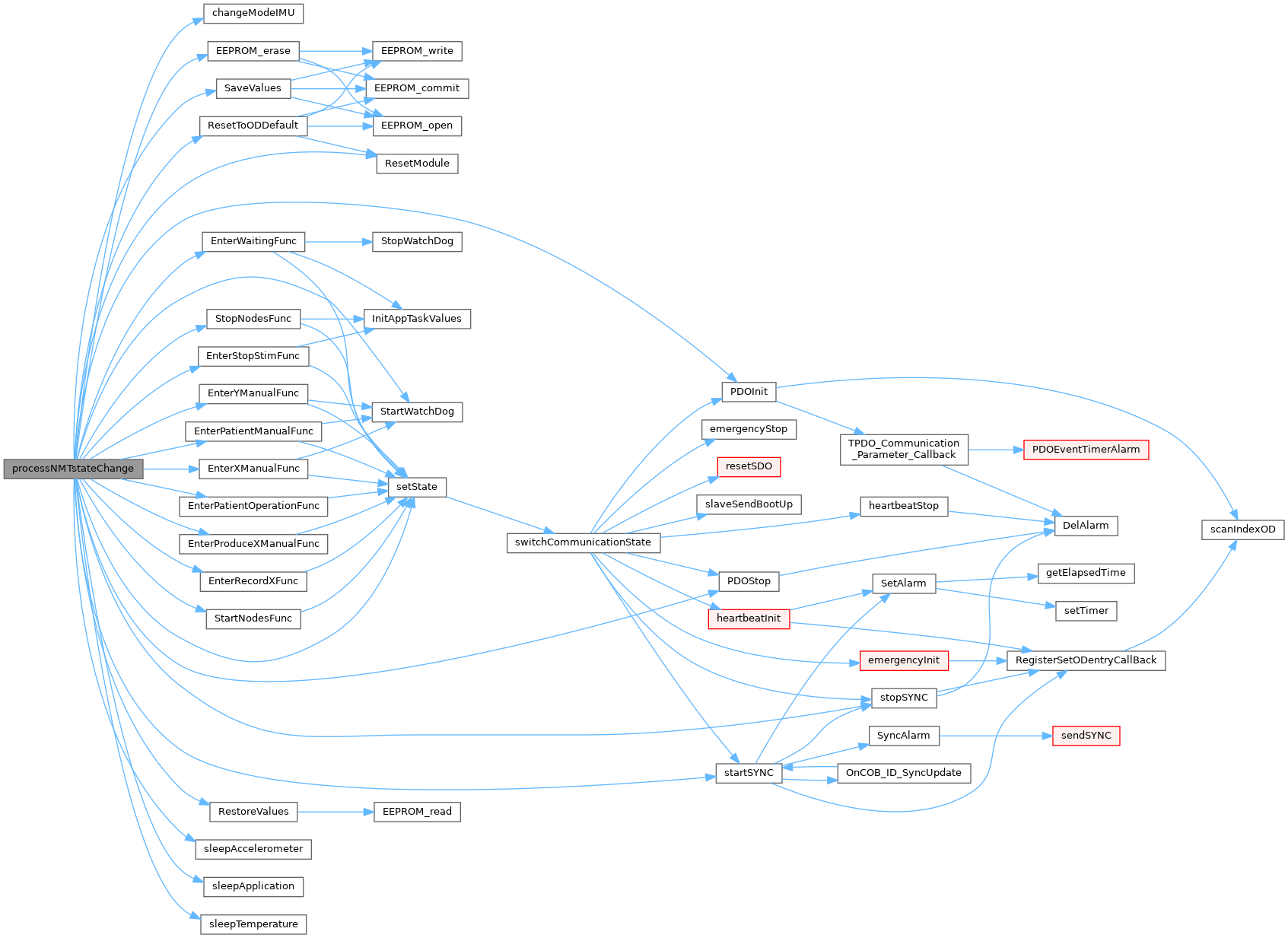
| void | processNMTstateChange (CO_Data *d, Message *m) |
| Manage the reception of a NMT message from the master. | |
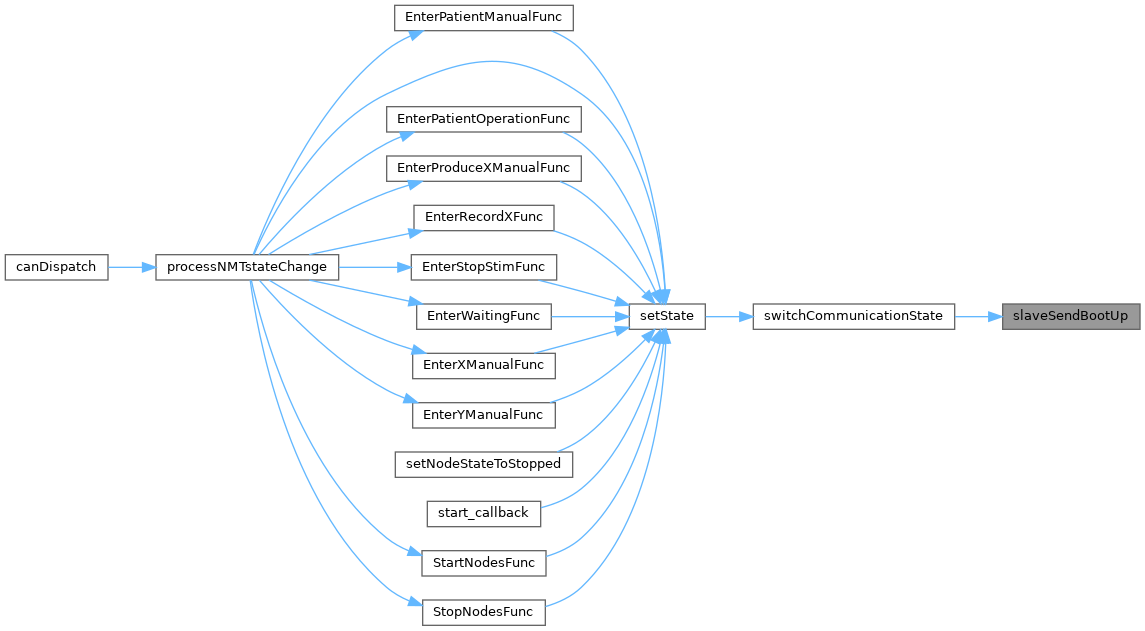
| UNS8 | slaveSendBootUp (CO_Data *d) |
| Transmit the boot-Up frame when the slave is moving from initialization state to pre_operational state. | |
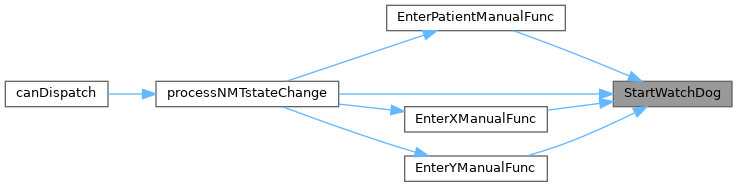
| void | StartWatchDog (CO_Data *d, UNS16 timebase) |
| Starts watchdog on slave. | |
| void | StopWatchDog (CO_Data *d) |
| Stops watchdog on slave. | |
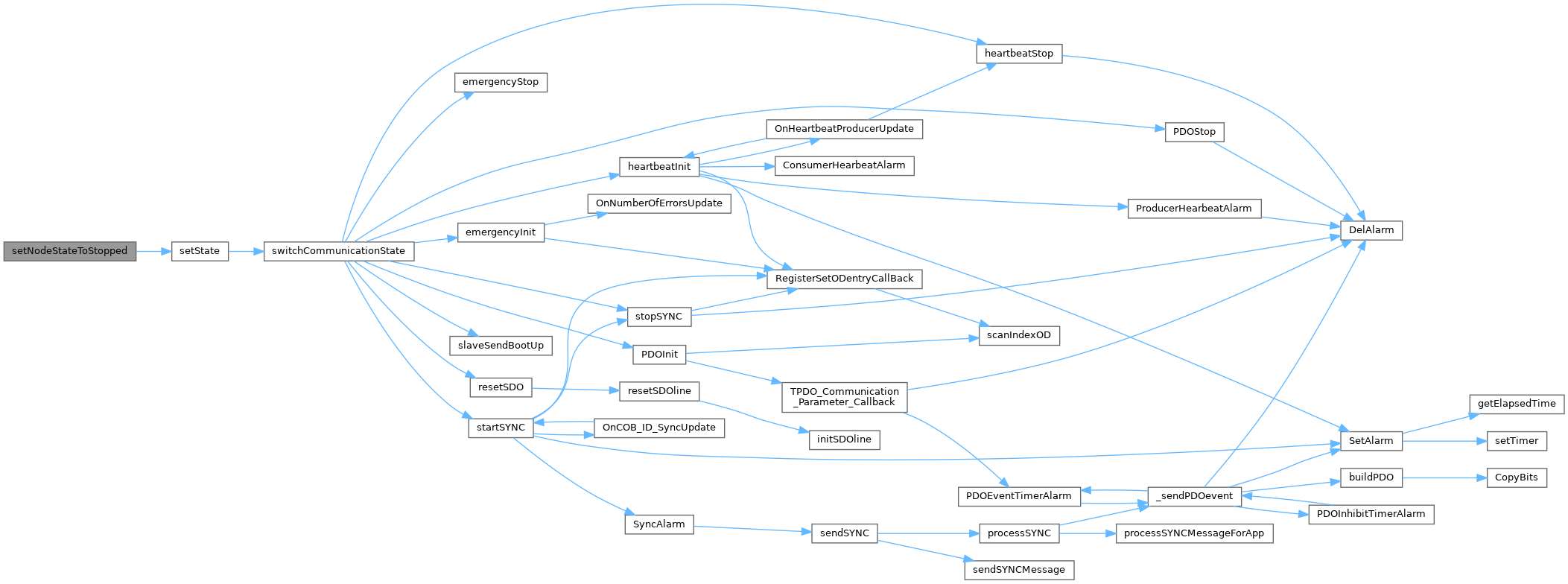
| void | setNodeStateToStopped (void) |
| <BRIEF> setNodeStateToStopped | |
Manage the reception of a NMT message from the master.
| *d | Pointer to the CAN data structure |
| *m | Pointer to the message received |
Definition at line 34 of file nmtSlave.c.
Referenced by canDispatch().

| void setNodeStateToStopped | ( | void | ) |
<BRIEF> setNodeStateToStopped
Definition at line 281 of file nmtSlave.c.
Transmit the boot-Up frame when the slave is moving from initialization state to pre_operational state.
| *d | Pointer on the CAN data structure |
Definition at line 227 of file nmtSlave.c.
Referenced by switchCommunicationState().
Starts watchdog on slave.
| *d | Pointer on the CAN data structure |
| timebase |
Definition at line 262 of file nmtSlave.c.
Referenced by EnterPatientManualFunc(), EnterXManualFunc(), EnterYManualFunc(), and processNMTstateChange().
| void StopWatchDog | ( | CO_Data * | d | ) |
Stops watchdog on slave.
| *d | Pointer on the CAN data structure |
Definition at line 272 of file nmtSlave.c.
Referenced by EnterWaitingFunc().
